
Stretch Community News - March 2026
Hello from all of us at Hello Robot!
This month’s Stretch Community News is packed with inspiring work from across our community. We’re excited to share research advancing assistive robotics in meaningful ways; from EMG-based control systems enabling in-home mobile manipulation for people with quadriplegia, to robot-assisted exercise programs supporting individuals with Parkinson’s disease. We’re also highlighting new insights into teleoperation and user experience, along with foundational advances like RobotSeg and Contact-Anchored Policies (CAP) that are pushing robot perception and manipulation forward.
It’s energizing to see Stretch being used in ways that blend engineering, clinical insight, and human-centered design to create real-world impact.
Read on for more details! And if you’d like your work featured in a future newsletter, we’d love to hear from you. Drop us a note at community@hello-robot.com.
Cheers,
Aaron Edsinger
CEO – Hello Robot
Contact-Anchored Policies (CAP) introduces a new paradigm in robot learning that conditions manipulation policies on physical contact points rather than language prompts, enabling stronger generalization across environments, embodiments, and tasks with far less demonstration data. Led by a team from New York University, CAP uses a modular library of utility models and a rapid real-to-sim refinement loop with the EgoGym benchmark to achieve robust zero-shot performance on core manipulation skills. With open-source code, models, and datasets, this work provides robotics researchers a powerful foundation for scalable, contact-aware manipulation learning.
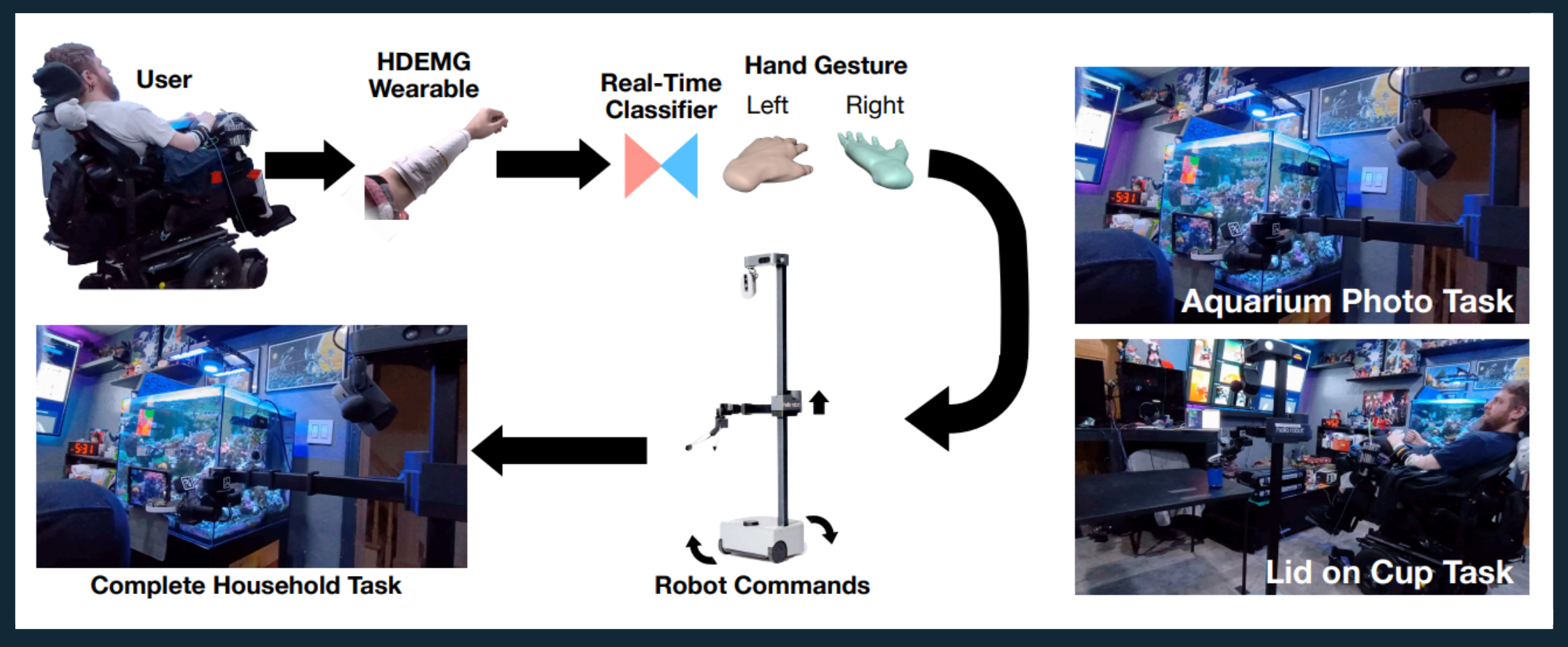
A 12-day in-home study by CMU researchers demonstrates that a user with quadriplegia can independently perform daily activities using bimanual, high-density EMG control of a mobile robot. By combining custom wearable HDEMG-sensing sleeves with a shared-autonomy framework - integrating vision, language, and motion-planning modules - the system successfully translated muscle signals into complex robotic manipulation, allowing the user to perform Activities of Daily Living in their own home without researcher assistance.
In a recent episode of the ATDev Podcast, host Owen sits down with V Nguyễn, an occupational therapist and clinical researcher at Hello Robot, to explore how human-centered design shapes the future of assistive robotics. The conversation highlights the role of clinicians in translating cutting-edge technology into meaningful, real-world solutions, introducing the idea of “solutioneering” and emphasizing collaboration across engineering, healthcare, and industry. For students interested in robotics with real social impact, this episode offers valuable insight into how interdisciplinary teams bring innovations like the Stretch robot to life.
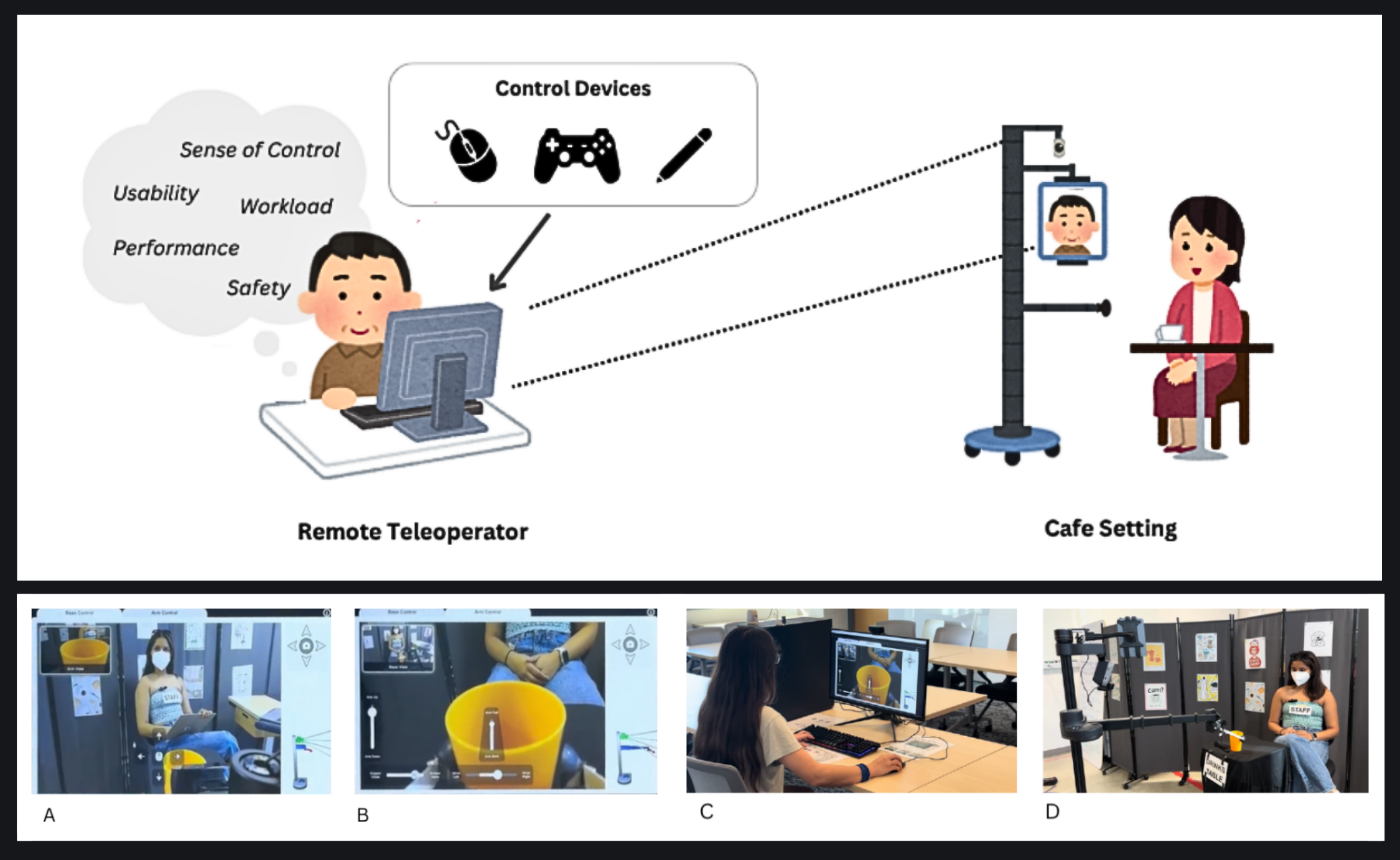
Researchers at University of San Diego have explored how different control devices shape the user experience of operating mobile telemanipulator robots in social telepresence settings. In a study of 63 participants using the Stretch robot in a café scenario, the team compared mouse, gamepad, and haptic controllers, finding that control choice significantly affects sense of control, usability, safety, and task performance, with the mouse delivering the strongest overall results. Their findings highlight important tradeoffs between speed, accuracy, and user confidence, and offer practical design recommendations for future teleoperation interfaces that better balance autonomy, usability, and human agency in robotics.
In an exciting creative experiment, Stanford Robotics students programmed Stretch 3 to create a series of paintings; then invited audiences to guess which painting was robot-made and which was a multi-million-dollar Franz Kline. Beyond the fun challenge, the project explores how embodied AI and robot authorship influence perception and emotional response to art. This blend of robotics, creativity, and human interpretation showcases how robots can be collaborators in artistic expression and sparks meaningful questions about how we relate to machine-generated work.
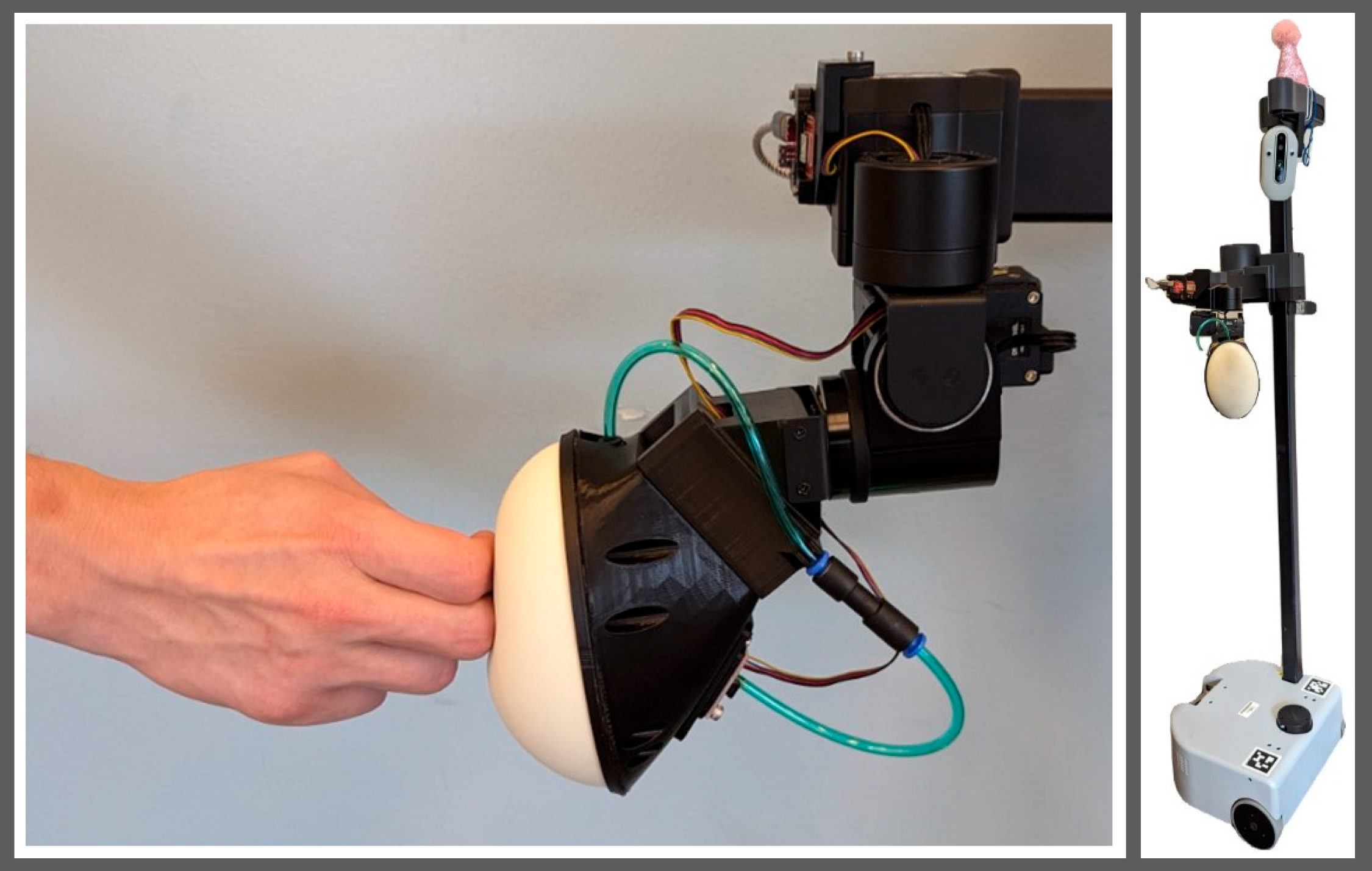
A pilot study led by researchers from Emory University School of Medicine and Georgia Tech explores how Stretch can effectively lead individuals with Parkinson’s Disease through targeted physical therapy exercises by using a soft, pressurized "bubble" as a tactile goal. The data showed that the exercise intensity and joint range matched traditional human-led sessions, and that even a single session resulted in an immediate and statistically significant improvement in the participant’s forward-reaching balance, validating this approach’s potential as a clinical tool for motor rehabilitation.
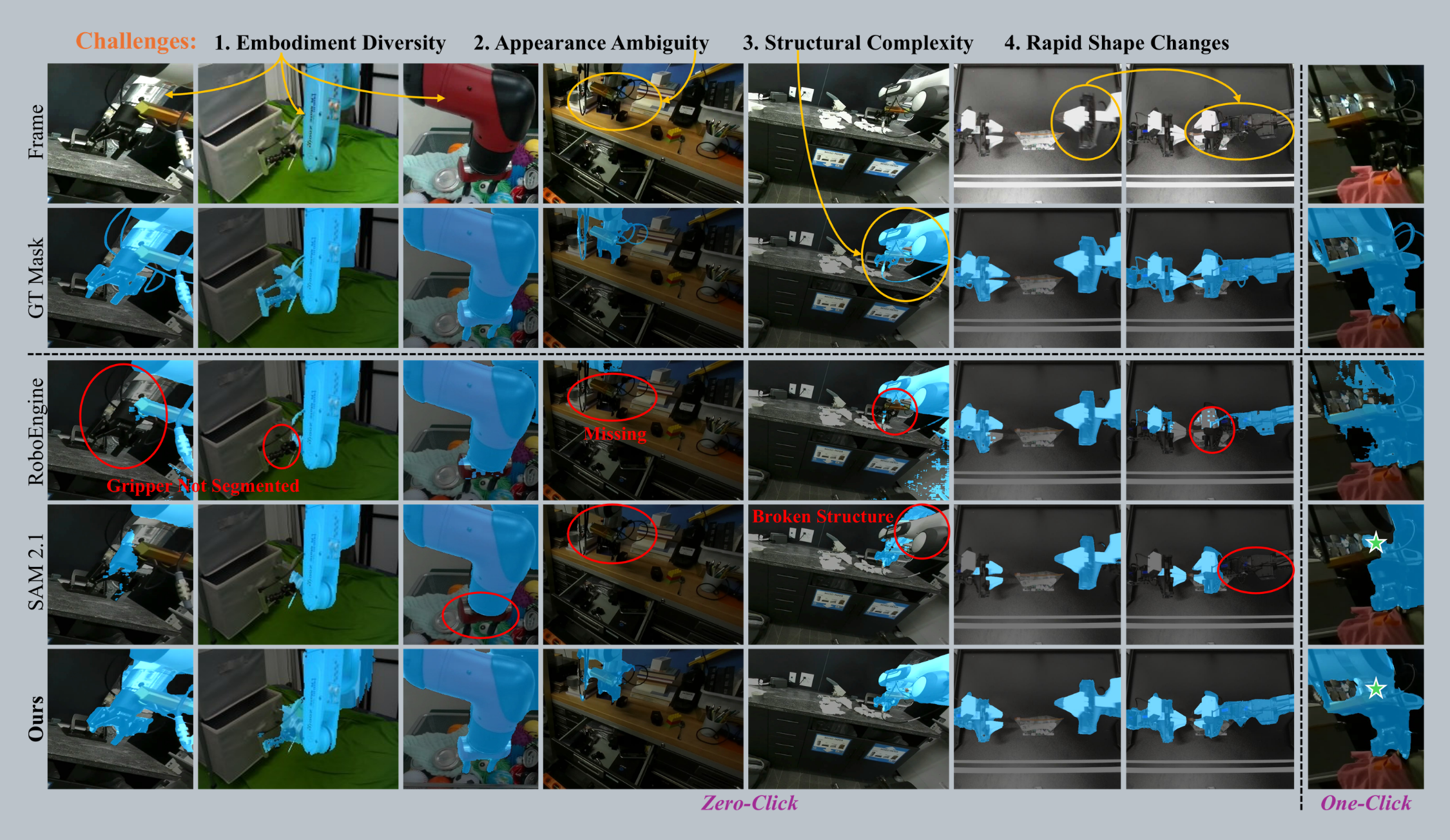
The RobotSeg project from the Show Lab at the National University of Singapore, introduces a new foundation model and dataset for segmenting robots in both images and video, a task that even powerful general-purpose models have struggled with. Built on top of SAM 2, RobotSeg delivers reliable, fine-grained segmentation of robot bodies, arms, and grippers with minimal prompting, enabling improved visual servoing, data augmentation, real-to-sim transfer, and safety monitoring, all critical capabilities for advanced robot perception research.