

Stretch for Human Interaction
Putting people first
Real users. Real impact.
Stretch was designed from the beginning to be an inclusive robot ready to help people in their homes. Researchers across the world are discovering new ways for robots and humans to work together.
The Robots for Humanity project works with Henry and Jane Evans in their home to help Stretch assist people with disabilities.
Friendly Design
Stretch plays well with people
Roll it around like a vacuum cleaner. Toss it the back of your car. Interact with its lightweight arm. Explore tasks with real users.
Simple to Teleoperate
Unlock quick experimentation
-
Eyes-on control with an Xbox-style gamepad.
-
Manipulate objects across a home or across the world. Eyes-off control with an accessible web interface.
-
Eyes-on direct control of the full 6 DOF end-effector pose in real time.
Examples From the Community
-

Robots for Humanity
UIUC, UW, Hello Robot
Using participatory design to empower an individual with quadriplegia accomplish everyday tasks via Stretch’s Web teleop interface.
-

The Unkidnappable Robot
Georgia Tech, Carnegie Mellon
Acoustic localization of sneaking people
-

Are Friendly Robots Trusted More?
University of Illinois Urbana-Champaign
An Analysis of Robot Sociability and Trust
-

Teleoperation for Assistive Mobile Manipulators
UW, Cornell, Seattle Academy
An Exploration of Accessible Remote Tele-operation for Assistive Mobile Manipulators in the Home
-
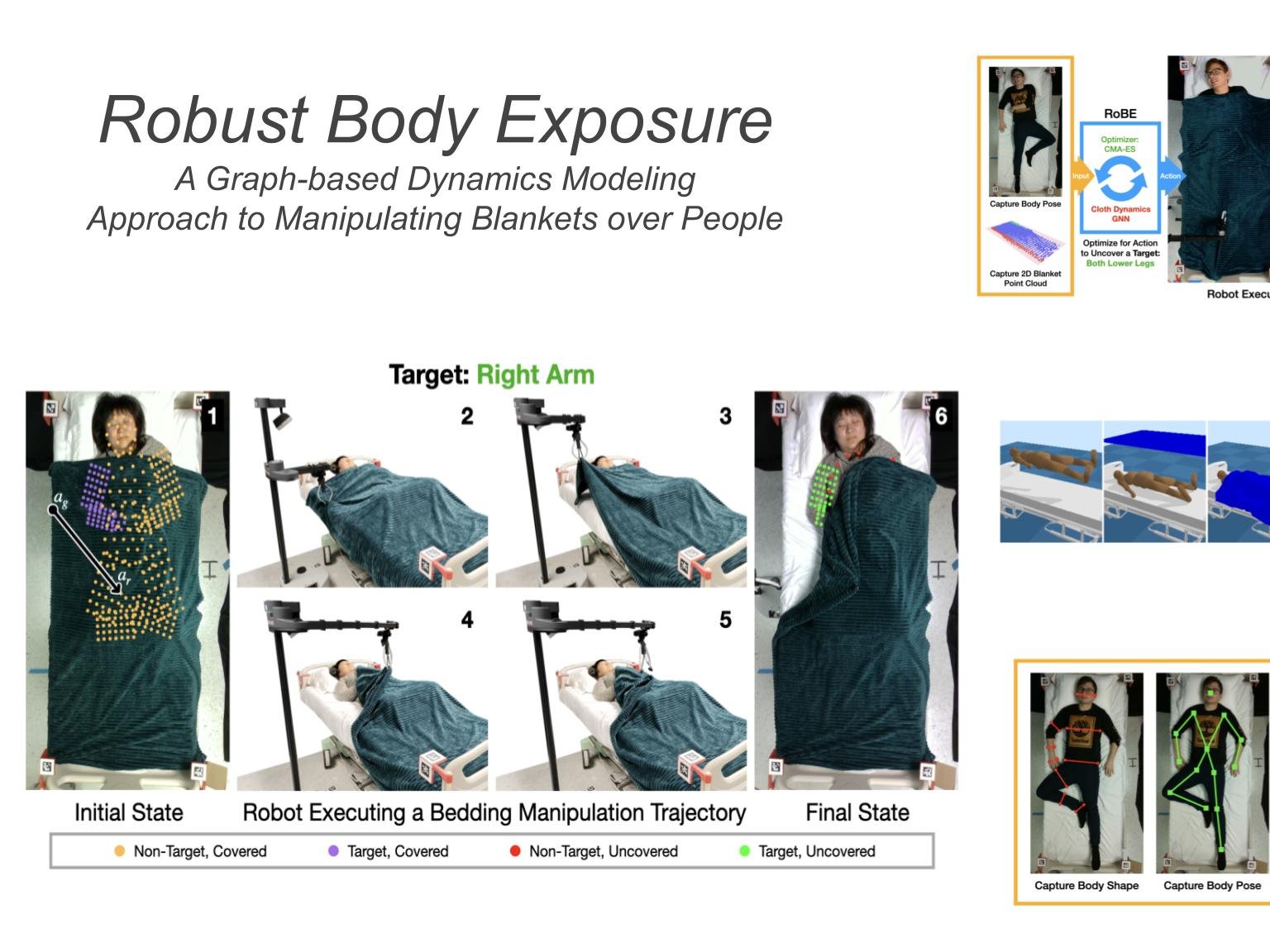
Robust Body Exposure
Carnegie Mellon University, Google X
A Graph-based Dynamics Modeling Approach to Manipulating Blankets over People
-

Gesture Control of Mobile Manipulators
Carnegie Mellon, Johns Hopkins
High-density Electromyography for Effective Gesture-based Control of Physically Assistive Mobile Manipulators
Still have questions?
Want to learn more — or see a demonstration of Stretch in action?
Drop us an email or fill out the form below. A member of our team will get back to you right away!