
Stretch Community News - December 2023
Welcome to the Hello Robot monthly community update!
Last month, we had the opportunity to connect with many of our community members at NeurIPS, especially at the Open Vocabulary Mobile Manipulation workshop where we announced the competition winner who will receive a Stretch!
Read on for details, as well as exciting new work in embodied AI, controlling Stretch with EMG, and an analysis of robot sociability. If you’d like to see your work featured in a future newsletter or on the Stretch Community Repo, please let us know!
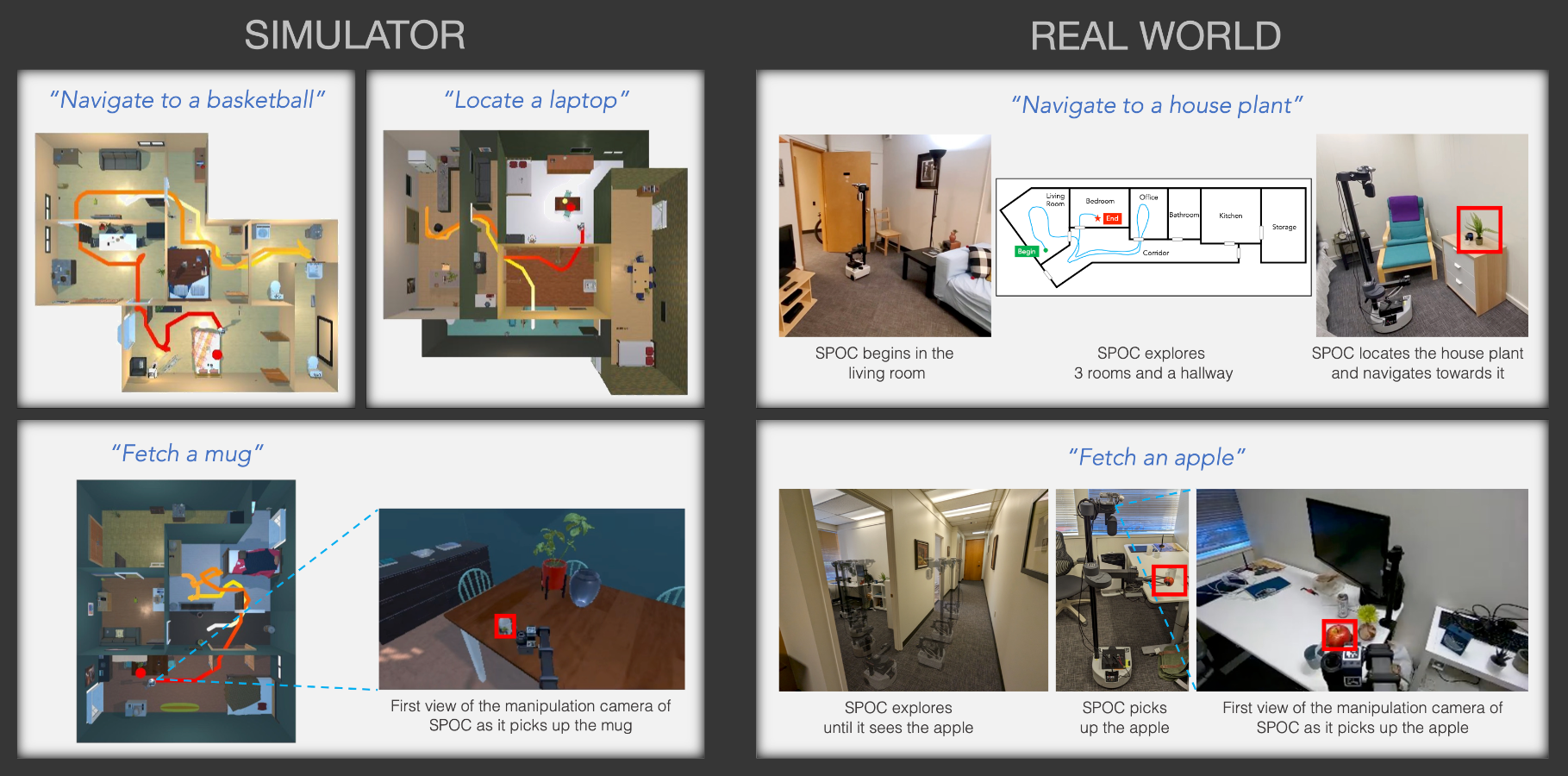
The Allen Institute for AI released SPOC, an agent for Stretch that learns from shortest paths to navigate, explore, and manipulate objects, both in simulation and the real world. Trained in simulation and using only RGB camera data, SPOC translates to real-world tasks on Stretch without RL or human data!

Harmonic Mobile Manipulation is a new end-to-end learning method for Stretch designed to jointly optimize both navigation and manipulation, facilitating more complex tasks like opening doors. This approach, from researchers at the Allen Institute and UCSD, is validated in simulated and real-world environments and adapts to novel settings without additional tuning.

Researchers at CMU and Johns Hopkins have developed a high-density electromyography interface with real-time hand gesture recognition to assist persons with quadriplegia in using mobile manipulators like Stretch, and evaluated it on a number of complicated activities of daily living like self-feeding.

The HomeRobot Open-Vocabulary Mobile Manipulation challenge has concluded! Thank you to all of the teams who competed and contributed to the NeurIPS workshop, and a big congratulations to our winners: UniTeam, representing Bielefeld University, IIIT-Allahabad, and ABV-IIITM.

Are friendly robots more trustworthy? New work from UIUC seeks to explore how older adults feel about robot sociability and trust in domestic robot support for instrumental activities of daily living.