
Stretch Community News - February 2024
Welcome to the Hello Robot monthly community update!
Last month saw the release of Stretch 3 - our best robot yet, featuring a redesigned Dex Wrist, gripper-mounted depth camera, upgraded compute and electronics, and more. We also had a new software release for Stretch in Ubuntu 22.04, with full ROS 2 support and a new web-based teleoperation interface. If you’re interested in learning more about Stretch 3, upgrading your Stretch 2 to take advantage of most of the features of Stretch 3, or taking advantage of our trade-in discount for Stretch RE1 users, please reach out to us directly!
This month, we have lots of human-robot interaction - in-home deployments with participatory design, end-user programming, robot-human collaborative cooking, telerobots in health care spaces, and more! Read on for details. If you’d like to see your work featured in a future newsletter, please let us know!

Cornell researchers released MOSAIC, a modular system for assistive and interactive cooking! Leveraging LLMs for interactive task planning, vision language models (VLMs) for visuomotor skills, and motion forecasting models for predicting human intents, Stretch worked with a human user and a fixed 7-DOF arm to assist in collaborative cooking tasks.

A new article in Ergonomics features research by UIUC, University of Washington, and Hello Robot, detailing deployments Stretch in the home of a patient with quadriplegia. It highlights the benefits of immersive participatory design in ensuring assistive robots meet the needs and expectations of care receivers and care partners.
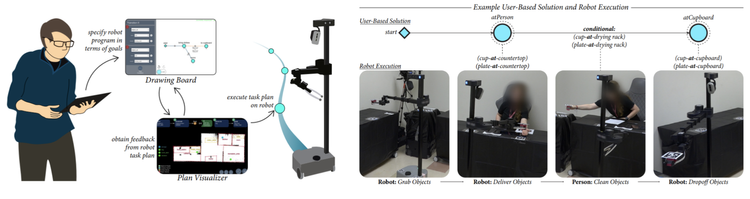
Polaris, a new end-user programming system developed at the Naval Research Laboratory, allows end users to specify tasks in terms of “goal predicates”, a flexible system that allows for varying levels of detail based on a user’s comfort level and requirements. A built-in Plan Visualizer then displays the robot’s high-level plan for feedback to ensure the robot’s actions meet user expectations.

Two new papers from Prof. Laurel Riek’s lab at UCSD explore the use of Stretch as a telerobot in health care settings - one investigates design considerations for mobile telemanipulators in the treatment of Long Covid; the other looks into the requirements of telepresence robots in dynamic, safety-critical spaces like Emergency Rooms.

What level of understanding about robots do we need to effectively and safely coexist with them? New work from Rice dives into this question, exploring both virtual and physical training methods and the advantages of combining them together.

An AI Magazine article shares details about the AI-CARING Institute, a multi-university collaboration focused on developing collaborative AI systems for aging adults living at home. Work with Stretch is highlighted in the context of Robotic Caregivers, a project-based course involving students and stakeholders in work involving caregiving robots.

Congratulations to ASU Professor Zhe Xu, who recently received an NSF-CAREER award for work into Temporal Causal Reinforcement Learning and Control!